robot end effector design
The links are connected by joints which provide the necessary rotational and translational capabilities to the mechanism. As their design allows a modular robot to distribute pressure and impacts evenly amongst other attached modules and therefore payload.
4 Robot End Of Arm Tooling Inlearc
Suction is a highly used type of end-effector in industry.
. ASCII characters only characters found on a standard US keyboard. The second type of multi-axis linear system that does not fall under the definition of Cartesian robot is the XY table. Teams are additionally judged on robot design community outreach and connection with the STEM community.
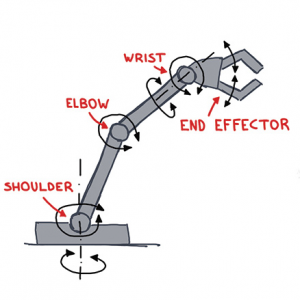
An end-effector also called a robot hand can be attached to the end of the chainAs other robotic mechanisms robot arms are typically classified in terms of the number of degrees of freedomUsually the number of degrees of freedom is equal to the number of joints. A serial robot arm can be described as a chain of links that are moved by joints which are actuated by motors. Browse our listings to find jobs in Germany for expats including jobs for English speakers or those in your native language.
6 to 30 characters long. For end effectors that need to communicate more information to and from the robot industrial communication protocols are used. And then the other safety aspect is the potential loss of power shouldnt result in a dangerous failure.
Productive Robotics Parallel Electric Gripperend effector Patented Robot Rolling Stand and Work Table. Given the desired robots end-effector positions inverse kinematics IK can determine an appropriate joint configuration for which the end-effectors move to the target pose. Kinematics equations are used to analyze and design articulated systems ranging from four-bar linkages to serial and.
The robot hand harvests a fruit by gripping and rotating it without damaging it and its tree. Often the end effector is a type of gripper that is used to manipulate parts. The robot can then be moved on screen and the process simulated.
Shows one commercial instantiation of the Delta Robot. The control of the end effector is done by the robot controller. The robot configuration is a list of joint positions that are within the position limits of the robot model and do not violate any constraints the robot has.
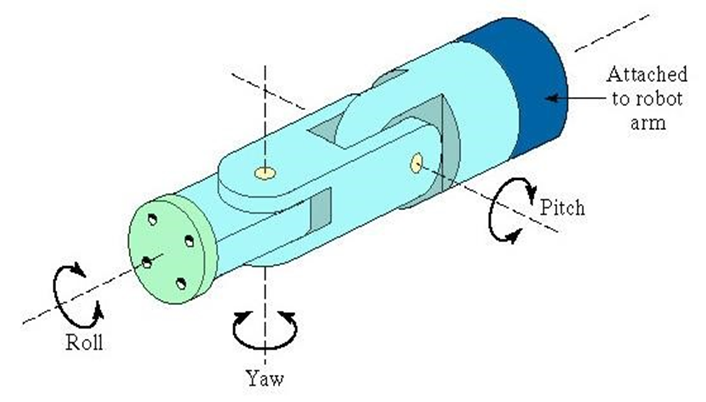
The part of a robotic arm design which interacts with the environment is usually the last link and it is called the end effector or end of arm tooling EOAT. There are few studies on control methods of overall configuration and distributed. This is where the hand would be in a human arm.
Multiply all of the matrices together starting with the first joint all the way up to the end effector. For very special jobs the end effector will be custom made by the people involved. Config randomConfigurationrobot tform getTransformrobotconfig endeffector base config 12 struct array with fields.
By combining your robot with the right end effector you empower its ability to handle complex processes in safe collaboration with human employees. Get a transformation from the end effector to the base. With collaborative robots you know since these are often used in close collaboration with people safety as a major consideration this means that the gripper or the end effector doesnt have any sharp edges or pinch points.
I offered a 2D visualization control first because everything is simpler in 2D. FIRST Robotics Competition is a shorter 6 week season with teams working to create larger robots to compete in a new game each season. Collaborative robots also known as cobots and light industrial robots are widespread today because of the rise of versatile tools such as robot arm grippers sensors and quick changers.
The final T vector will contain the position of the end effector. In a Cartesian robot the second or third Y or Z axis is cantilevered being supported at only one end by the axis below it. With a 7-axis robot arm design each robot provides extreme flexibility.
For each joint of the robot populate a new 4 x 4 matrix with the following values. Must contain at least 4 different symbols. One of the most common type of end effector is a gripper assembly.
JointName JointPosition tform -05484 08362 0 0 -08362 -05484 0 0 0 0 10000 0 0 0 0 10000. Given the design road map the robot is ready to be fabricated. The advantages of robotics simulation is that it saves time in the design of robotics applications.
For example palletizing robots use end effectors to pick up and move boxes. Give it a spin. We used the harvesting robot hand as the end effector.
It is usually not the most convenient representation for the purposes of robot design and forward kinematics calculations but due to the minimal number of parameters used 4 per link it remains popular for robot structure optimization problems like in robot calibration. A robotics simulator is used to create embedded applications for a robot without depending on the physical operation of the robot arm and end effector. Current control methods of continuum robots mainly focus on achieving accurate position and posture control of end-effector and impedance control of the end-effector 16 28 99101 which are mainly solved at the level of actuation and design optimization.
The difference between Cartesian robots and XY tables lies in the mounting and loading arrangement. An end-effector frame for the 2R robot above could be defined with. Integrators and suppliers may have the ability to design a proof of concept for your application.
The R matrix will contain the orientation of the end effector. A robot is a machineespecially one programmable by a computercapable of carrying out a complex series of actions automatically. OB7s collaborative robot arm has 7 moving joints to reach around objects and obstacles in the work area which is not possible for robots with 6 joints.
In match play the robot moves. 30 to whole-body planning for soft planar manipulators considers both the primary task of advancing the pose of the end effector. This example will open up a new window with our 3D visualizer and in the Controls menu in the visualizer you will find sliders that you can use to drive the end-effector of the robot around.
For the simpler ones discrete IOs will be used. Kinematics equations are the constraint equations of a mechanical system such as a robot manipulator that define how input movement at one or more joints specifies the configuration of the device in order to achieve a task position or end-effector location. An end effector is a device the robot uses to perform its proposed task.
These design features lead to simple end-to-end training and high accuracy even on low resolution input images and improving the speed vs accuracy trade-off.

4 End Of Effector Selection Procedure Inlearc
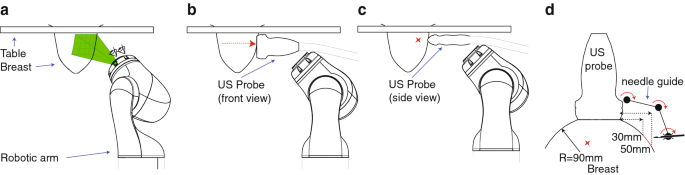
Design Of An End Effector For Robot Assisted Ultrasound Guided Breast Biopsies Springerlink

7 Types Of Robot Grippers And Their Industrial Applications

Design Of A Force Controlled End Effector With Low Inertia Effect For Robotic Polishing Using Macro Mini Robot Approach Sciencedirect

How To Choose The Best Robotic Gripper For Your Work

End Effector Wafer Handling Systems Coreflow

Delta Robot End Effectors Robotdigg

Robot Grippers Explained

End Effectors Design For Making
End Effectors Wafer Handling Innovent

What Is Inverse Kinematics Matlab Simulink
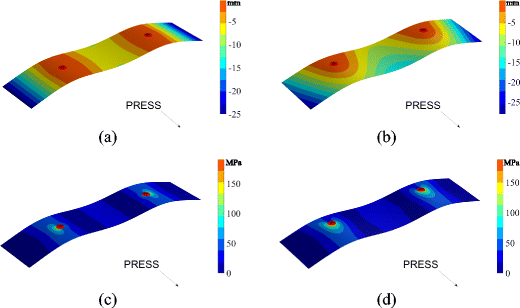
End Effector Design Optimisation And Multi Robot Motion Planning For Handling Compliant Parts Springerlink
Review Robot Calibration Design Robotics

End Effector Design Factors Robotics Rg Group

Analysis And Comparison Of Control Strategies For Normal Adjustment Of A Robotic Drilling End Effector Extrica Publisher Of International Research Journals

Tuff Automation Types Of End Effectors
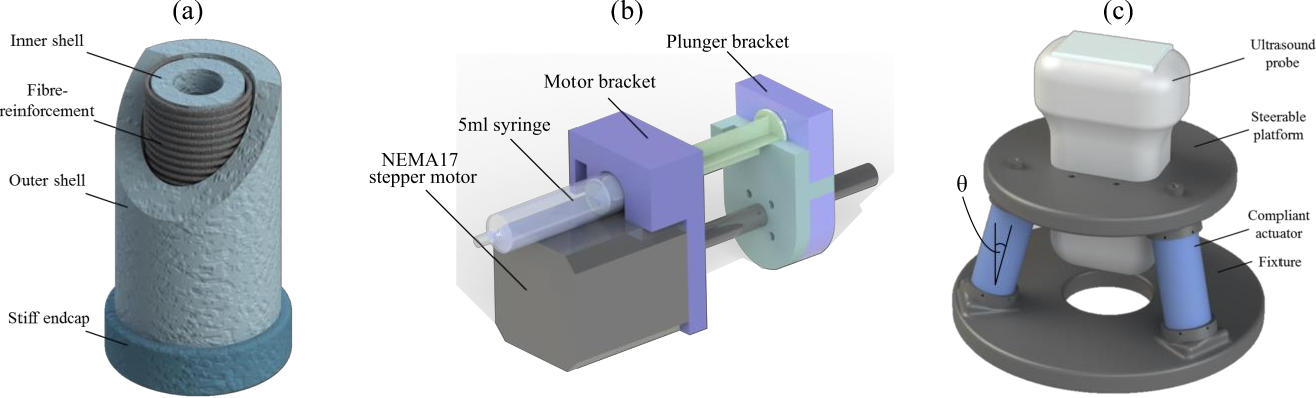
Figure 2 From Design Of A Soft Parallel End Effector Applied To Robot Guided Ultrasound Interventions Semantic Scholar

4 Robot End Of Arm Tooling Inlearc
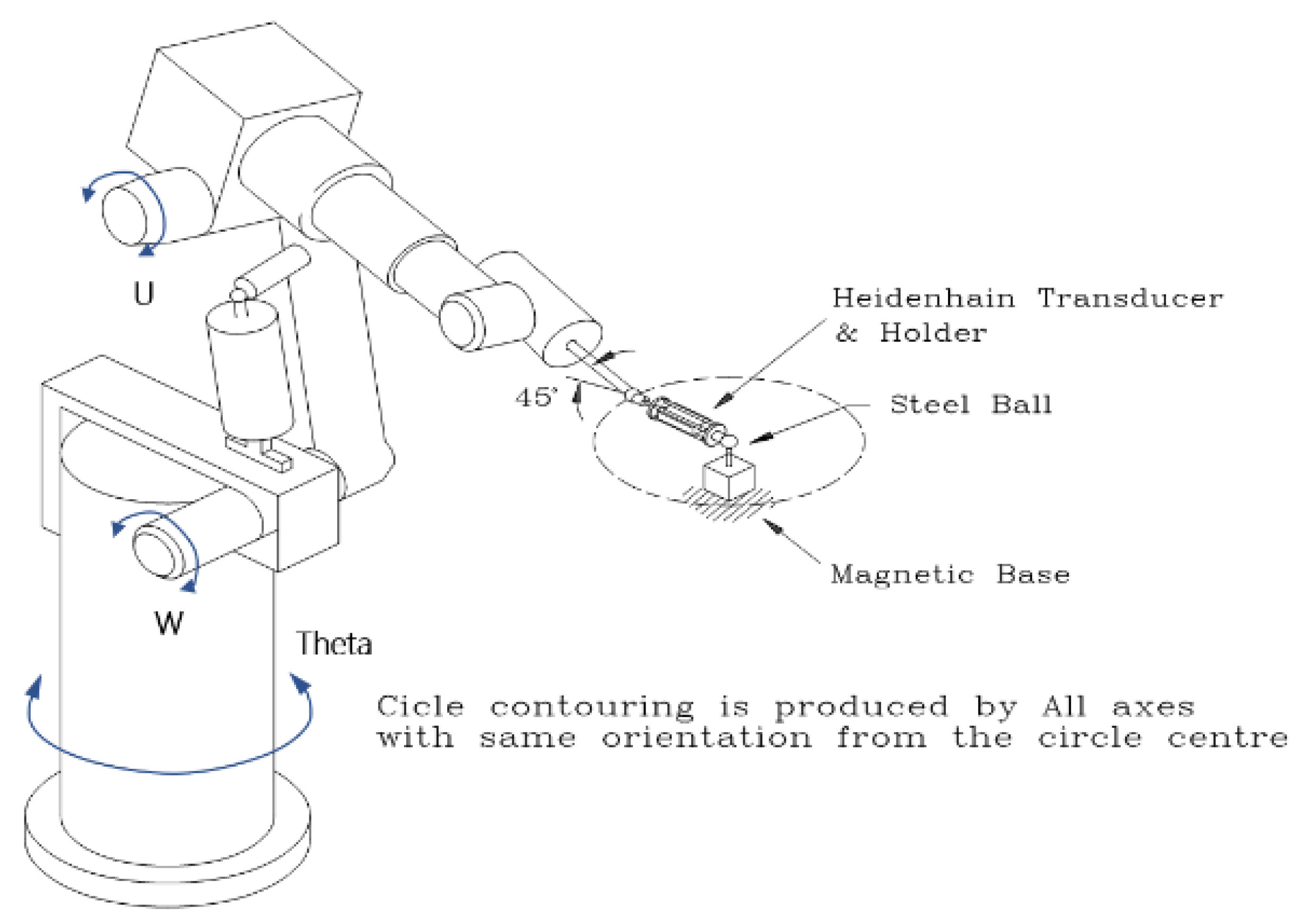
Applied Sciences Free Full Text Study Of Orientation Error On Robot End Effector And Volumetric Error Of Articulated Robot